Destpêkera nerm amûrek kontrola motorê ye ku destpêka nerm, rawestandina nerm, teserûfa enerjiya barê sivik û fonksiyonên parastinê yên pirjimar entegre dike. Ew bi giranî ji tîrîstorên sê-qonaxî yên dij-paralel pêk tê ku bi rêzê di navbera dabînkirina hêzê û motora kontrolkirî û devreya kontrola wê ya elektronîkî de girêdayî ne. Rêbazên cûda ji bo kontrolkirina goşeya rêberiyê ya tîrîstorên sê-qonaxî yên dij-paralel têne bikar anîn, da ku voltaja têketinê ya motora kontrolkirî li gorî hewcedariyên cûda biguheze.
1. Kontrola otomatîkî ya dîjîtal a mîkroprosesorê dipejirîne, performansa elektromagnetîk a wê pir baş e. destpêkirina nerm, rawestandina nerm an rawestandina azad.
٢. Voltaja destpêkirinê, herikîn, dema destpêkirina nerm û rawestandina nerm dikare li gorî barên cûda were pejirandin da ku şoka herikîna destpêkirinê kêm bike. Performansa stabîl, xebitandina hêsan, dîmendera rasterast, qebareya piçûk, seta dîjîtal, xwedî fonksiyonên tele-kontrol û kontrola derveyî ye.
3. Parastina li dijî windabûna qonaxê, zêdevoltaja zêde, zêdebarîkirin, zêdeherikîn, zêdegermbûn heye.
4. Fonksiyonên nîşandana voltaja têketinê, nîşandana herika xebitandinê, xwe-kontrolkirina têkçûnê, bîra xeletiyê hene. Nirxa derana simulasyonê ya 0-20mA heye, dikare çavdêriya herika motorê pêk bîne.
Motorên înduksîyonê yên AC xwedî avantajên kêm-mesref, pêbaweriya bilind û lênêrîna kêm in.
Dezawantaj:
1. niha destpêkirinê 5-7 caran ji niha bilindtir e. Û ew hewce dike ku prid hêzê xwedî marjînek mezin be, û ew ê jî jiyana xebatê ya cîhaza kontrola elektrîkê kêm bike, lêçûna parastinê baştir bike.
2. Torka destpêkirinê du caran ji torka destpêkirina normal zêdetir e û dibe sedema şoka barê û zirara pêkhateyên ajotinê. Destpêkera nerm a RDJR6 modula thyistora kontrolkirî û teknolojiya guheztina qonaxê bikar tîne da ku voltaja motorê bi rêkûpêk baştir bike. Û ew dikare hewcedariya torka motorê, herik û barkirinê bi parametreya kontrolê pêk bîne. Destpêkera nerm a rêzeya RDJR6 mîkroprosesor bikar tîne da ku fonksiyonên destpêkirina nerm û rawestandina nerm a motora asinkron a AC kontrol bike û pêk bîne, xwedî fonksiyona parastinê ya bêkêmasî ye, û bi berfirehî di alavên ajotina motorê de di warên metalurjî, petrol, kanan û pîşesaziya kîmyewî de tê bikar anîn.
Taybetmendiyên hilberînê
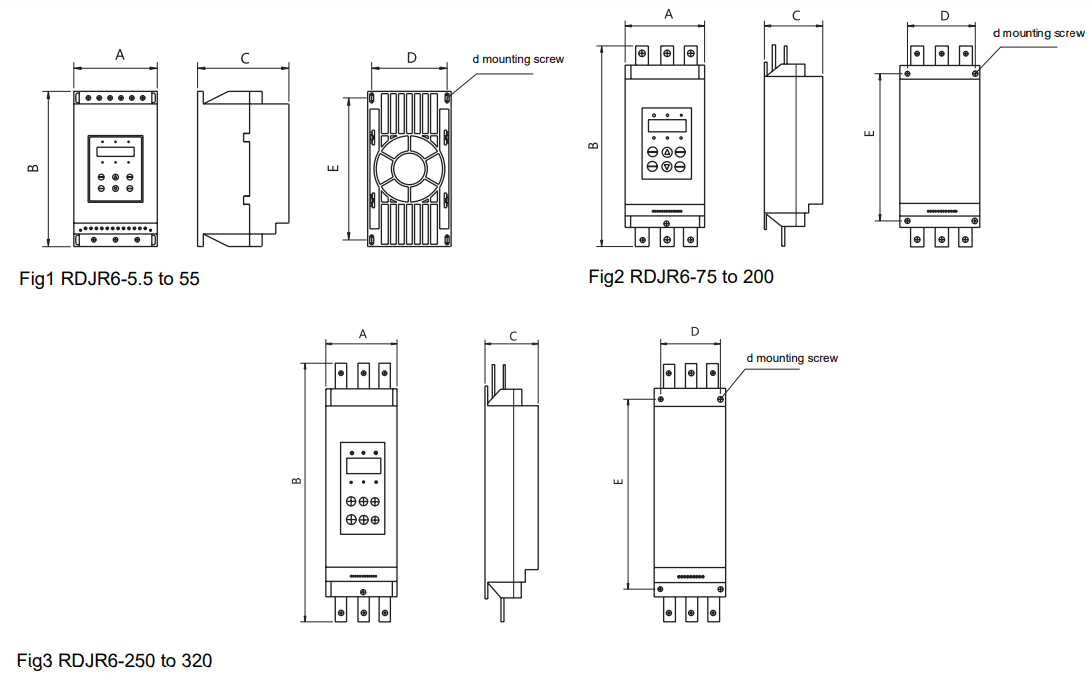
| Jimareya Modelê | Hêza rêjeyî (kW) | Herika nirxandî (A) | Hêza motorê ya sepandinê (kW) | Mezinahiya şiklê (mm) | Giranî (kg) | Not | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | Wêne 2.1 |
| RDJR6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | Wêne 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | Wêne 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
Dîyagram
Parametreya fonksiyonel
| Navê dizî | Navê fonksiyonê | Rêzeya mîhengkirinê | Destçûnî | Ders | |||||||
| P0 | voltaja destpêkê | (30-70) | 30 | PB1=1, Modela meyldariya voltaja bi bandor e; dema ku mîhenga PB moda niha be, nirxa xwerû ya voltaja destpêkê %40 e. | |||||||
| P1 | dema destpêkirina nerm | (2-60) çirke | 16 çirke | PB1=1, Modela meyla voltaja bi bandor e | |||||||
| P2 | dema rawestandina nerm | (0-60) çirke | 0s | Mîhenga=0, ji bo rawestandina belaş. | |||||||
| P3 | dema bernameyê | (0-999) çirke | 0s | Piştî wergirtina fermanan, bi karanîna cureya hejmartinê destpêkirin piştî nirxa mîhengkirina P3 dereng bixin. | |||||||
| P4 | derengketina destpêkirinê | (0-999) çirke | 0s | Derengketina çalakiya relayê ya bernamekirî | |||||||
| P5 | derengketina bernameyê | (0-999) çirke | 0s | Piştî rakirina germbûna zêde û derengketina mîhengkirina P5, ew ket rewşa amadebûnê. | |||||||
| P6 | derengketina navberê | (50-500)% | %400 | Bi mîhenga PB ve girêdayî be, dema ku mîhenga PB 0 be, nirxa xwerû %280 e, û guhêrbar derbasdar e. Dema ku mîhenga PB 1 be, nirxa sînorkirinê %400 e. | |||||||
| P7 | herika destpêka sînorkirî | (50-200)% | %100 | Ji bo verastkirina nirxa parastina zêdebarkirina motorê bikar bînin, P6, celebê têketina P7 bi P8 ve girêdayî ye. | |||||||
| P8 | Herika xebitandinê ya herî zêde | 0-3 | 1 | Ji bo destnîşankirina nirxa niha an jî rêjeyan bikar bînin | |||||||
| P9 | moda nîşandanê ya niha | (40-90)% | %80 | Ji nirxa mîhengê kêmtir, dîmendera têkçûnê "Err09" e. | |||||||
| PA | parastina voltaja kêm | (100-140)% | %120 | Ji nirxa mîhengê bilindtir, dîmendera têkçûnê "Err10" e | |||||||
| PB | rêbaza destpêkirinê | 0-5 | 1 | 0 bi sînorkirina herikê, 1 voltaja, 2 bi lêdan + sînorkirina herikê, 3 bi lêdan + sînorê herikê, 4 meyla herikê, 5 cureya dual-loop | |||||||
| PC | parastina derketinê destûrê dide | 0-4 | 4 | 0 sereke, 1 barkirina deqeyekê, 2 standard, 3 barkirina giran, 4 pileya bilind | |||||||
| PD | moda kontrola operasyonê | 0-7 | 1 | Ji bo hilbijartina mîhengên panel û termînala kontrola derveyî bikar bînin. 0, tenê ji bo xebitandina panelê, 1 ji bo xebitandina hem panel û hem jî termînala kontrola derveyî. | |||||||
| PE | hilbijartina ji nû ve destpêkirina otomatîk | 0-13 | 0 | 0: qedexe, 1-9 ji bo demên vesazkirina otomatîk | |||||||
| PF | destûrê bide guherandina parametreyê | 0-2 | 1 | 0: fohibid, 1 ji bo daneyên sererastkirî yên beşa destûrdayî, 2 ji bo hemî daneyên sererastkirî yên destûrdayî | |||||||
| PH | navnîşana ragihandinê | 0-63 | 0 | Ji bo ragihandina destpêkera nerm a pirjimar û cîhaza jorîn bikar bînin | |||||||
| PJ | derana bernameyê | 0-19 | 7 | Ji bo mîhengkirina derana relayê ya bernamekirî (3-4) bikar bînin. | |||||||
| PL | herika rawestandina nerm bi sînor e | (20-100)% | %80 | Ji bo mîhenga sînorkirî ya herikîna nerm a P2 bikar bînin | |||||||
| PP | herika motorê ya nirxandî | (11-1200)A | nirxa nirxandî | Ji bo têketina herikîna nominal a motorê bikar bînin | |||||||
| PU | parastina kêmbûna voltaja motorê | (10-90)% | qedexekirin | Ji bo danîna fonksiyonên parastina kêmbûna voltaja motorê bikar bînin. | |||||||
Talîmatên têkçûnê
| Navê dizî | Ders | Pirsgirêk û çareserî | |||||||||
| Err00 | bê têkçûn | Xeletiya kêmbûna voltaja, zêdebûna voltaja, germbûna zêde, an jî vebûna termînala rawestandina demkî hate çareserkirin. Û nîşana panelê vêdikeve, ji bo vesazkirinê bişkoja "rawestîne" bikirtînin, dûv re motorê bidin destpêkirin. | |||||||||
| Err01 | termînala rawestandina demkî ya derveyî vekirî ye | Kontrol bike ka termînala demkî ya derveyî 7 û termînala hevpar 10 kurteçûn in an têkiliya NC ya cîhazên parastinê yên din normal e. | |||||||||
| Err02 | germbûna zêde ya destpêkera nerm | Germahiya radyatorê ji 85°C derbastir be, parastina li hember zêdegermbûnê, destpêkera nerm motorê pir caran dide destpêkirin an jî hêza motorê ji bo destpêkera nerm ne derbasdar e. | |||||||||
| Err03 | destpêkirina demjimêrên zêde | Destpêkirina daneyên mîhengê ne guncaw e an jî bar pir giran e, kapasîteya hêzê pir piçûk e | |||||||||
| Err04 | windabûna qonaxa têketinê | Kontrol bike ka têketin an çerxa sereke xeletî heye, an jî kontaktora bypass dikare bişkê û bi awayekî normal devreyê çêbike, an jî kontrola silîkonê vekirî ye. | |||||||||
| Err05 | windabûna qonaxa derketinê | Kontrol bike ka têketin an xeleka sereke xeletî heye, an ka kontaktora bypass dikare bişkê û bi awayekî normal devreyê çêbike, an ka kontrola silîkonê vekirî ye, an ka girêdana motorê hin xeletî hene. | |||||||||
| Err06 | sê-qonaxî ya nehevseng | Kontrol bike ka hêza 3-qonaxî ya têketinê û motorê hin xeletî hene, an jî transformatorê herikê sînyalan dide. | |||||||||
| Err07 | destpêkirina herikîna zêde | Heke bar pir giran be an jî hêza motorê bi destpêkera nerm re were sepandin, an jî nirxa mîhengê ya PC-yê (parastina derketinê destûr e) xeletiya mîhengê hebe. | |||||||||
| Err08 | parastina zêdebarkirina operasyonê | Ger bar pir giran be an jî P7 be, mîhenga PP xelet e. | |||||||||
| Err09 | voltaja kêm | Kontrol bike ka voltaja hêza têketinê an jî dîroka mîhengkirinê ya P9 xelet e an na | |||||||||
| Err10 | zêdevoltaja | Kontrol bike ka voltaja hêza têketinê an jî dîroka mîhengkirina PA xelet e an na | |||||||||
| Err11 | çewtiya mîhengkirina daneyan | Ji bo destpêkirina ji nû ve sazkirinê mîhengan biguherîne an jî bişkoja "Enter" bikirtîne | |||||||||
| Err12 | kurteçûna barkirinê | Kontrol bike ka silîkon kurtçerx bûye, an bar pir giran e, an jî kela motorê kurtçerx bûye. | |||||||||
| Err13 | çewtiya ji nû ve destpêkirina girêdanê | Kontrol bike ka termînala destpêkirina derveyî 9 û termînala rawestandinê 8 li gorî celebê du-xêzî ve girêdayî ne. | |||||||||
| Err14 | çewtiya girêdana termînala rawestandina derveyî | Dema ku mîhenga PD 1, 2, 3, 4 be (destûrê bide kontrola derveyî), termînala rawestandina derveyî 8 û termînala hevpar 10 kurtçerx nabin. Tenê ew kurtçerx bin, motor dikare were destpêkirin. | |||||||||
| Err15 | kêmbûna barkirina motorê | Motor û çewtiya barkirinê kontrol bikin. | |||||||||
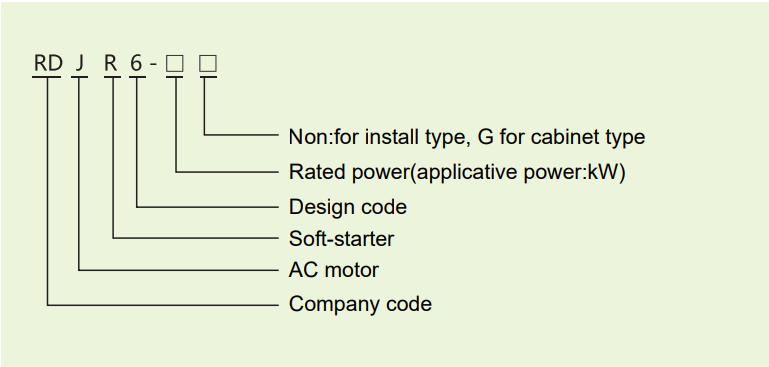
Jimareya Modelê
Termînala kontrola derveyî

Pênasîna termînala kontrola derveyî
| Nirxa guheztinê | Koda termînalê | Fonksiyona termînalê | Ders | |||||||
| Derana relayê | 1 | Derana derbasbûnê | têkiliya kontrolkirina bypass, dema ku destpêkera nerm bi serkeftî dest pê dike, ew bê dabînkirina hêzê TU têkilî ye, kapasîte: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | Derana relayê ya bernamekirî | Cureyê derketinê û fonksiyon ji hêla P4 û PJ ve têne danîn, bê dabînkirina hêzê bê têkilî ye, kapasîte: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | Derana relaya têkçûnê | dema ku destpêkera nerm têk diçe, ev rela girtî ye, bê dabînkirina hêzê têkiliyek tune ye, kapasîte: AC250V/5A | ||||||||
| 6 | ||||||||||
| Beyan | 7 | Rawestgeha demkî | Ger destpêkerê nerm bi awayekî normal dest pê bike, divê ev termînal bi termînal 10 were kurtkirin. | |||||||
| 8 | Rawestandin/sifirkirin | bi termînala 10 ve girêdide da ku 2-xet, 3-xet kontrol bike, li gorî rêbaza girêdanê. | ||||||||
| 9 | Destpêkirin | |||||||||
| 10 | Termînala hevpar | |||||||||
| Derana analog | 11 | xala hevpar a simulasyonê (-) | Herika derketinê ya 4 caran herika nirxandî 20mA ye, ew dikare bi pîvana DC ya derveyî jî were tesbît kirin, Ew dikare berxwedana barkirinê ya herî zêde 300 derxe. | |||||||
| 12 | derana herikîna simulasyonê (+) | |||||||||
Panela nîşandanê

| Nîşanker | Ders | ||||||||
| AMADE | dema ku hêz vekirî ye û amade ye, ev nîşan ronî dibe | ||||||||
| NASNAME | dema ku bypass dixebite, ev nîşan ronî ye | ||||||||
| ŞAŞÎ | dema ku têkçûn çêdibe, ev nîşan ronî dibe | ||||||||
| A | daneyên mîhengê nirxa niha ye, ev nîşanker ronî ye | ||||||||
| % | daneyên mîhengê rêjeya niha ye, ev nîşanker ronî ye | ||||||||
| s | danîna daneyan dem e, ev nîşane ronî ye | ||||||||
talîmata nîşana rewşê
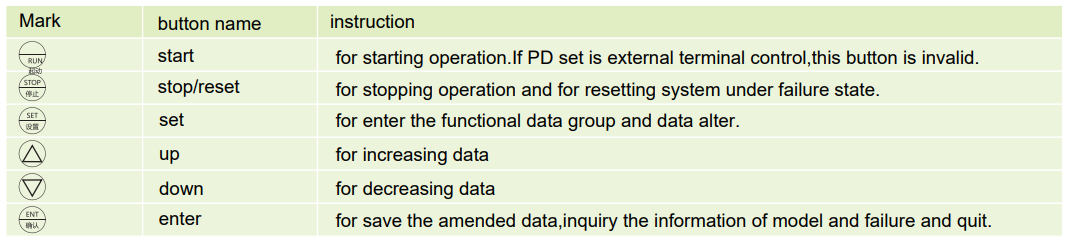
Talîmatên bişkokê
Destpêkera nerm a rêzeya RDJR6 5 cureyên rewşa xebitandinê hene: amade, xebitandin, têkçûn, destpêk û rawestandin, amade, xebitandin, têkçûn.
sînyala nîşana nisbî heye. Talîmat li Tabloya jorîn binêre.
Di pêvajoya destpêkirina nerm û rawestandina nerm de, ew tenê dikare daneyan destnîşan bike ger ew di rewşek din de be.
Di rewşa mîhengkirinê de, rewşa mîhengkirinê dê piştî 2 hûrdeman bêyî ku tu operasyonê bike ji rewşa mîhengkirinê derkeve.
Pêşî bişkoja "enter" bikirtînin, paşê şarj bikin û destpêkerê bidin destpêkirin. Piştî guhdarîkirina dengê hişyariyê, ew dikare ji nû ve were sazkirin.
nirxa kargeha vegerandina daneyan.
Dîmen û pîvana montajê
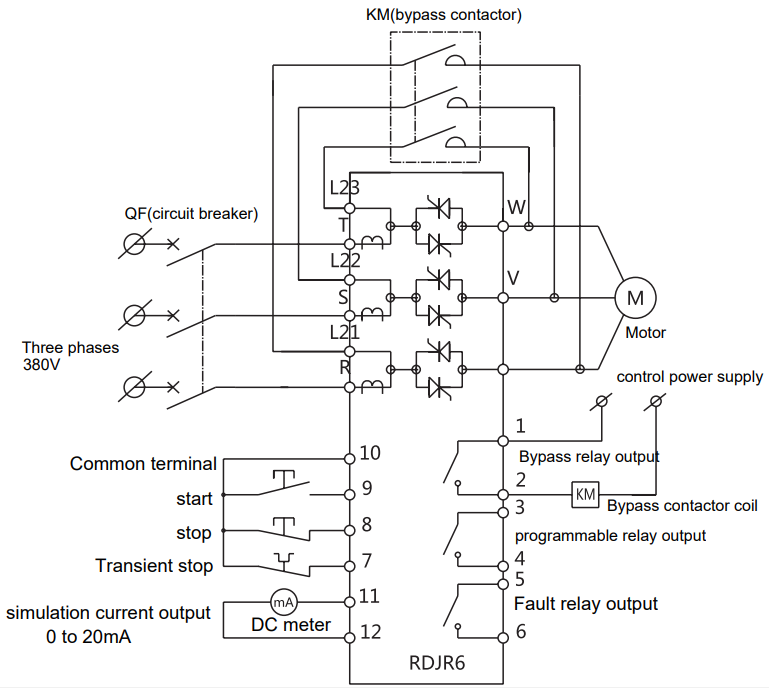
Diyagrama serîlêdanê
Diyagrama kontrola normal
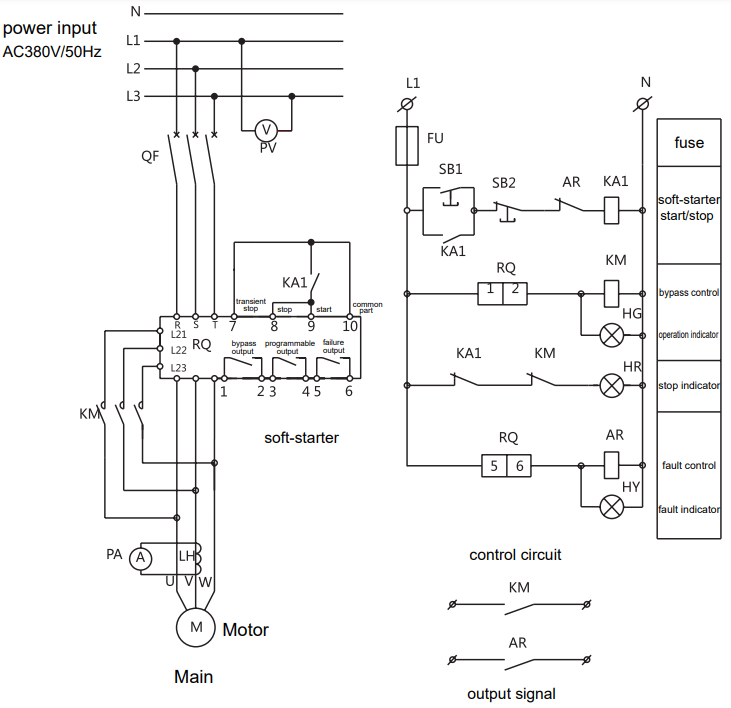
Ders:
1. Termînala derve du rêzên cureyê tcontrol dipejirîne. Dema ku KA1 ji bo destpêkirinê girtî ye, ji bo rawestandinê vedike.
2. destpêkerê nerm ku li jor 75kW hewce dike ku keleka têkiliyê ya bypassê bi relaya navîn kontrol bike, ji ber kapasîteya ajotinê ya sînorkirî ya têkiliya relaya navxweyî ya nerm-strater.
12.2 yek diyagrama kontrola hevpar û yek jî ya standby
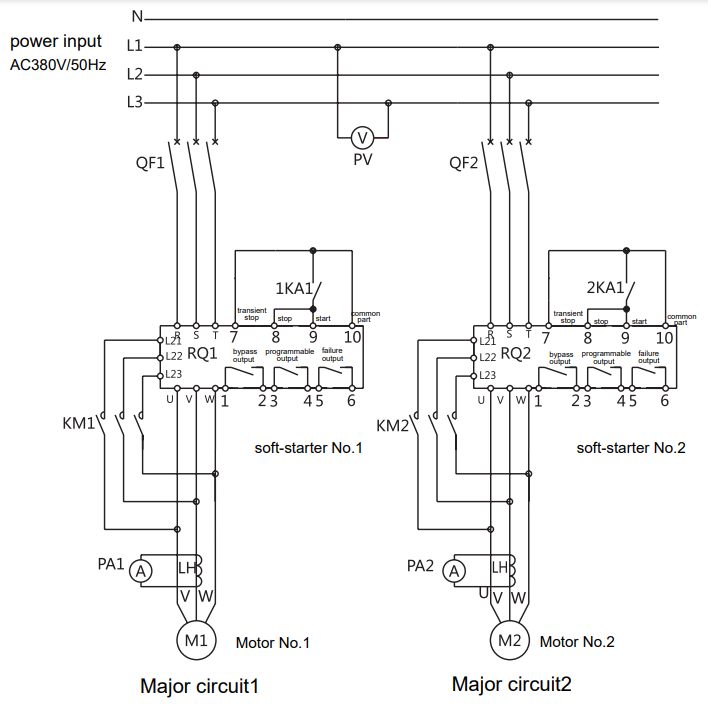
١٢.٣ yek diyagrama kontrola hevpar û yek jî ya standby
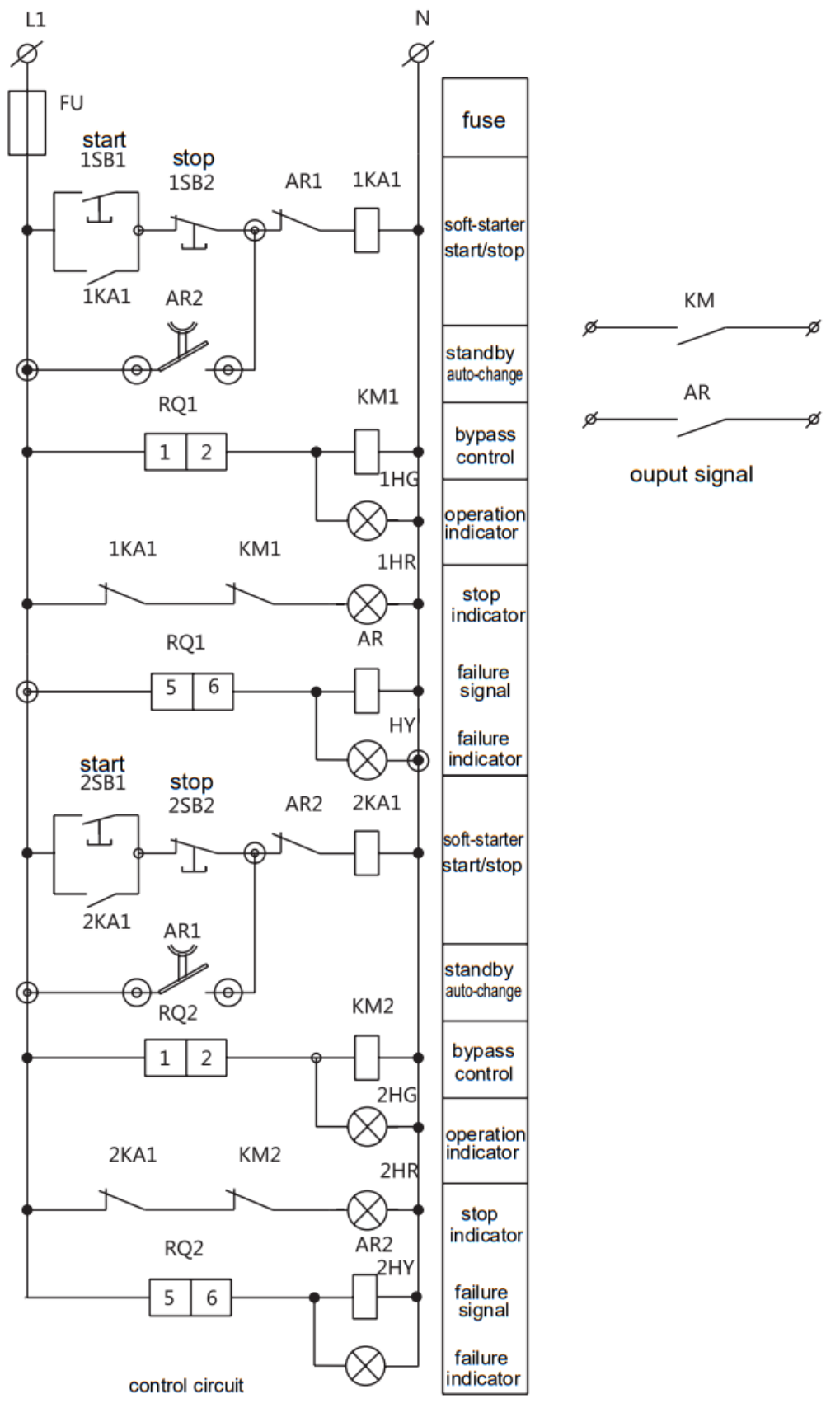
Ders:
1. Di nexşeyê de, termînala derveyî cureyê du-xêzî bikar tîne
(dema 1KA1 an 2KA1 girtî be, ew dest pê dike. dema ew dişkên, ew radiweste.)
2. Destpêkerê nerm ê li jor 75kW hewce ye ku kelîna kontaktora bypassê bi relaya navîn kontrol bike ji ber ku kapasîteya ajotinê ya têkiliya relaya navîn a navxweyî ya destpêkerê nerm bi sînor e.
Motorên înduksîyonê yên AC xwedî avantajên kêm-mesref, pêbaweriya bilind û lênêrîna kêm in.
Dezawantaj:
1. niha destpêkirinê 5-7 caran ji niha bilindtir e. Û ew hewce dike ku prid hêzê xwedî marjînek mezin be, û ew ê jî jiyana xebatê ya cîhaza kontrola elektrîkê kêm bike, lêçûna parastinê baştir bike.
2. Torka destpêkirinê du caran ji torka destpêkirina normal zêdetir e û dibe sedema şoka barê û zirara pêkhateyên ajotinê. Destpêkera nerm a RDJR6 modula thyistora kontrolkirî û teknolojiya guheztina qonaxê bikar tîne da ku voltaja motorê bi rêkûpêk baştir bike. Û ew dikare hewcedariya torka motorê, herik û barkirinê bi parametreya kontrolê pêk bîne. Destpêkera nerm a rêzeya RDJR6 mîkroprosesor bikar tîne da ku fonksiyonên destpêkirina nerm û rawestandina nerm a motora asinkron a AC kontrol bike û pêk bîne, xwedî fonksiyona parastinê ya bêkêmasî ye, û bi berfirehî di alavên ajotina motorê de di warên metalurjî, petrol, kanan û pîşesaziya kîmyewî de tê bikar anîn.
Taybetmendiyên hilberînê
| Jimareya Modelê | Hêza rêjeyî (kW) | Herika nirxandî (A) | Hêza motorê ya sepandinê (kW) | Mezinahiya şiklê (mm) | Giranî (kg) | Not | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | Wêne 2.1 |
| RDJR6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | Wêne 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | Wêne 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
Dîyagram
Parametreya fonksiyonel
| Navê dizî | Navê fonksiyonê | Rêzeya mîhengkirinê | Destçûnî | Ders | |||||||
| P0 | voltaja destpêkê | (30-70) | 30 | PB1=1, Modela meyldariya voltaja bi bandor e; dema ku mîhenga PB moda niha be, nirxa xwerû ya voltaja destpêkê %40 e. | |||||||
| P1 | dema destpêkirina nerm | (2-60) çirke | 16 çirke | PB1=1, Modela meyla voltaja bi bandor e | |||||||
| P2 | dema rawestandina nerm | (0-60) çirke | 0s | Mîhenga=0, ji bo rawestandina belaş. | |||||||
| P3 | dema bernameyê | (0-999) çirke | 0s | Piştî wergirtina fermanan, bi karanîna cureya hejmartinê destpêkirin piştî nirxa mîhengkirina P3 dereng bixin. | |||||||
| P4 | derengketina destpêkirinê | (0-999) çirke | 0s | Derengketina çalakiya relayê ya bernamekirî | |||||||
| P5 | derengketina bernameyê | (0-999) çirke | 0s | Piştî rakirina germbûna zêde û derengketina mîhengkirina P5, ew ket rewşa amadebûnê. | |||||||
| P6 | derengketina navberê | (50-500)% | %400 | Bi mîhenga PB ve girêdayî be, dema ku mîhenga PB 0 be, nirxa xwerû %280 e, û guhêrbar derbasdar e. Dema ku mîhenga PB 1 be, nirxa sînorkirinê %400 e. | |||||||
| P7 | herika destpêka sînorkirî | (50-200)% | %100 | Ji bo verastkirina nirxa parastina zêdebarkirina motorê bikar bînin, P6, celebê têketina P7 bi P8 ve girêdayî ye. | |||||||
| P8 | Herika xebitandinê ya herî zêde | 0-3 | 1 | Ji bo destnîşankirina nirxa niha an jî rêjeyan bikar bînin | |||||||
| P9 | moda nîşandanê ya niha | (40-90)% | %80 | Ji nirxa mîhengê kêmtir, dîmendera têkçûnê "Err09" e. | |||||||
| PA | parastina voltaja kêm | (100-140)% | %120 | Ji nirxa mîhengê bilindtir, dîmendera têkçûnê "Err10" e | |||||||
| PB | rêbaza destpêkirinê | 0-5 | 1 | 0 bi sînorkirina herikê, 1 voltaja, 2 bi lêdan + sînorkirina herikê, 3 bi lêdan + sînorê herikê, 4 meyla herikê, 5 cureya dual-loop | |||||||
| PC | parastina derketinê destûrê dide | 0-4 | 4 | 0 sereke, 1 barkirina deqeyekê, 2 standard, 3 barkirina giran, 4 pileya bilind | |||||||
| PD | moda kontrola operasyonê | 0-7 | 1 | Ji bo hilbijartina mîhengên panel û termînala kontrola derveyî bikar bînin. 0, tenê ji bo xebitandina panelê, 1 ji bo xebitandina hem panel û hem jî termînala kontrola derveyî. | |||||||
| PE | hilbijartina ji nû ve destpêkirina otomatîk | 0-13 | 0 | 0: qedexe, 1-9 ji bo demên vesazkirina otomatîk | |||||||
| PF | destûrê bide guherandina parametreyê | 0-2 | 1 | 0: fohibid, 1 ji bo daneyên sererastkirî yên beşa destûrdayî, 2 ji bo hemî daneyên sererastkirî yên destûrdayî | |||||||
| PH | navnîşana ragihandinê | 0-63 | 0 | Ji bo ragihandina destpêkera nerm a pirjimar û cîhaza jorîn bikar bînin | |||||||
| PJ | derana bernameyê | 0-19 | 7 | Ji bo mîhengkirina derana relayê ya bernamekirî (3-4) bikar bînin. | |||||||
| PL | herika rawestandina nerm bi sînor e | (20-100)% | %80 | Ji bo mîhenga sînorkirî ya herikîna nerm a P2 bikar bînin | |||||||
| PP | herika motorê ya nirxandî | (11-1200)A | nirxa nirxandî | Ji bo têketina herikîna nominal a motorê bikar bînin | |||||||
| PU | parastina kêmbûna voltaja motorê | (10-90)% | qedexekirin | Ji bo danîna fonksiyonên parastina kêmbûna voltaja motorê bikar bînin. | |||||||
Talîmatên têkçûnê
| Navê dizî | Ders | Pirsgirêk û çareserî | |||||||||
| Err00 | bê têkçûn | Xeletiya kêmbûna voltaja, zêdebûna voltaja, germbûna zêde, an jî vebûna termînala rawestandina demkî hate çareserkirin. Û nîşana panelê vêdikeve, ji bo vesazkirinê bişkoja "rawestîne" bikirtînin, dûv re motorê bidin destpêkirin. | |||||||||
| Err01 | termînala rawestandina demkî ya derveyî vekirî ye | Kontrol bike ka termînala demkî ya derveyî 7 û termînala hevpar 10 kurteçûn in an têkiliya NC ya cîhazên parastinê yên din normal e. | |||||||||
| Err02 | germbûna zêde ya destpêkera nerm | Germahiya radyatorê ji 85°C derbastir be, parastina li hember zêdegermbûnê, destpêkera nerm motorê pir caran dide destpêkirin an jî hêza motorê ji bo destpêkera nerm ne derbasdar e. | |||||||||
| Err03 | destpêkirina demjimêrên zêde | Destpêkirina daneyên mîhengê ne guncaw e an jî bar pir giran e, kapasîteya hêzê pir piçûk e | |||||||||
| Err04 | windabûna qonaxa têketinê | Kontrol bike ka têketin an çerxa sereke xeletî heye, an jî kontaktora bypass dikare bişkê û bi awayekî normal devreyê çêbike, an jî kontrola silîkonê vekirî ye. | |||||||||
| Err05 | windabûna qonaxa derketinê | Kontrol bike ka têketin an xeleka sereke xeletî heye, an ka kontaktora bypass dikare bişkê û bi awayekî normal devreyê çêbike, an ka kontrola silîkonê vekirî ye, an ka girêdana motorê hin xeletî hene. | |||||||||
| Err06 | sê-qonaxî ya nehevseng | Kontrol bike ka hêza 3-qonaxî ya têketinê û motorê hin xeletî hene, an jî transformatorê herikê sînyalan dide. | |||||||||
| Err07 | destpêkirina herikîna zêde | Heke bar pir giran be an jî hêza motorê bi destpêkera nerm re were sepandin, an jî nirxa mîhengê ya PC-yê (parastina derketinê destûr e) xeletiya mîhengê hebe. | |||||||||
| Err08 | parastina zêdebarkirina operasyonê | Ger bar pir giran be an jî P7 be, mîhenga PP xelet e. | |||||||||
| Err09 | voltaja kêm | Kontrol bike ka voltaja hêza têketinê an jî dîroka mîhengkirinê ya P9 xelet e an na | |||||||||
| Err10 | zêdevoltaja | Kontrol bike ka voltaja hêza têketinê an jî dîroka mîhengkirina PA xelet e an na | |||||||||
| Err11 | çewtiya mîhengkirina daneyan | Ji bo destpêkirina ji nû ve sazkirinê mîhengan biguherîne an jî bişkoja "Enter" bikirtîne | |||||||||
| Err12 | kurteçûna barkirinê | Kontrol bike ka silîkon kurtçerx bûye, an bar pir giran e, an jî kela motorê kurtçerx bûye. | |||||||||
| Err13 | çewtiya ji nû ve destpêkirina girêdanê | Kontrol bike ka termînala destpêkirina derveyî 9 û termînala rawestandinê 8 li gorî celebê du-xêzî ve girêdayî ne. | |||||||||
| Err14 | çewtiya girêdana termînala rawestandina derveyî | Dema ku mîhenga PD 1, 2, 3, 4 be (destûrê bide kontrola derveyî), termînala rawestandina derveyî 8 û termînala hevpar 10 kurtçerx nabin. Tenê ew kurtçerx bin, motor dikare were destpêkirin. | |||||||||
| Err15 | kêmbûna barkirina motorê | Motor û çewtiya barkirinê kontrol bikin. | |||||||||
Jimareya Modelê
Termînala kontrola derveyî
Pênasîna termînala kontrola derveyî
| Nirxa guheztinê | Koda termînalê | Fonksiyona termînalê | Ders | |||||||
| Derana relayê | 1 | Derana derbasbûnê | têkiliya kontrolkirina bypass, dema ku destpêkera nerm bi serkeftî dest pê dike, ew bê dabînkirina hêzê TU têkilî ye, kapasîte: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | Derana relayê ya bernamekirî | Cureyê derketinê û fonksiyon ji hêla P4 û PJ ve têne danîn, bê dabînkirina hêzê bê têkilî ye, kapasîte: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | Derana relaya têkçûnê | dema ku destpêkera nerm têk diçe, ev rela girtî ye, bê dabînkirina hêzê têkiliyek tune ye, kapasîte: AC250V/5A | ||||||||
| 6 | ||||||||||
| Beyan | 7 | Rawestgeha demkî | Ger destpêkerê nerm bi awayekî normal dest pê bike, divê ev termînal bi termînal 10 were kurtkirin. | |||||||
| 8 | Rawestandin/sifirkirin | bi termînala 10 ve girêdide da ku 2-xet, 3-xet kontrol bike, li gorî rêbaza girêdanê. | ||||||||
| 9 | Destpêkirin | |||||||||
| 10 | Termînala hevpar | |||||||||
| Derana analog | 11 | xala hevpar a simulasyonê (-) | Herika derketinê ya 4 caran herika nirxandî 20mA ye, ew dikare bi pîvana DC ya derveyî jî were tesbît kirin, Ew dikare berxwedana barkirinê ya herî zêde 300 derxe. | |||||||
| 12 | derana herikîna simulasyonê (+) | |||||||||
Panela nîşandanê
| Nîşanker | Ders | ||||||||
| AMADE | dema ku hêz vekirî ye û amade ye, ev nîşan ronî dibe | ||||||||
| NASNAME | dema ku bypass dixebite, ev nîşan ronî ye | ||||||||
| ŞAŞÎ | dema ku têkçûn çêdibe, ev nîşan ronî dibe | ||||||||
| A | daneyên mîhengê nirxa niha ye, ev nîşanker ronî ye | ||||||||
| % | daneyên mîhengê rêjeya niha ye, ev nîşanker ronî ye | ||||||||
| s | danîna daneyan dem e, ev nîşane ronî ye | ||||||||
talîmata nîşana rewşê
Talîmatên bişkokê
Destpêkera nerm a rêzeya RDJR6 5 cureyên rewşa xebitandinê hene: amade, xebitandin, têkçûn, destpêk û rawestandin, amade, xebitandin, têkçûn.
sînyala nîşana nisbî heye. Talîmat li Tabloya jorîn binêre.
Di pêvajoya destpêkirina nerm û rawestandina nerm de, ew tenê dikare daneyan destnîşan bike ger ew di rewşek din de be.
Di rewşa mîhengkirinê de, rewşa mîhengkirinê dê piştî 2 hûrdeman bêyî ku tu operasyonê bike ji rewşa mîhengkirinê derkeve.
Pêşî bişkoja "enter" bikirtînin, paşê şarj bikin û destpêkerê bidin destpêkirin. Piştî guhdarîkirina dengê hişyariyê, ew dikare ji nû ve were sazkirin.
nirxa kargeha vegerandina daneyan.
Dîmen û pîvana montajê
Diyagrama serîlêdanê
Diyagrama kontrola normal
Ders:
1. Termînala derve du rêzên cureyê tcontrol dipejirîne. Dema ku KA1 ji bo destpêkirinê girtî ye, ji bo rawestandinê vedike.
2. destpêkerê nerm ku li jor 75kW hewce dike ku keleka têkiliyê ya bypassê bi relaya navîn kontrol bike, ji ber kapasîteya ajotinê ya sînorkirî ya têkiliya relaya navxweyî ya nerm-strater.
12.2 yek diyagrama kontrola hevpar û yek jî ya standby
١٢.٣ yek diyagrama kontrola hevpar û yek jî ya standby
Ders:
1. Di nexşeyê de, termînala derveyî cureyê du-xêzî bikar tîne
(dema 1KA1 an 2KA1 girtî be, ew dest pê dike. dema ew dişkên, ew radiweste.)
2. Destpêkerê nerm ê li jor 75kW hewce ye ku kelîna kontaktora bypassê bi relaya navîn kontrol bike ji ber ku kapasîteya ajotinê ya têkiliya relaya navîn a navxweyî ya destpêkerê nerm bi sînor e.